How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum
4.5 (533) In stock

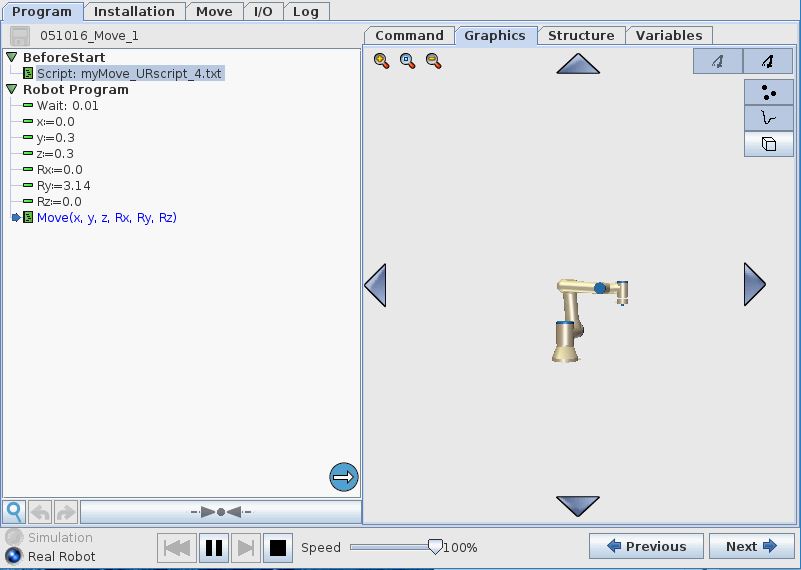
Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to

Universal Robots UR10 & UR10e
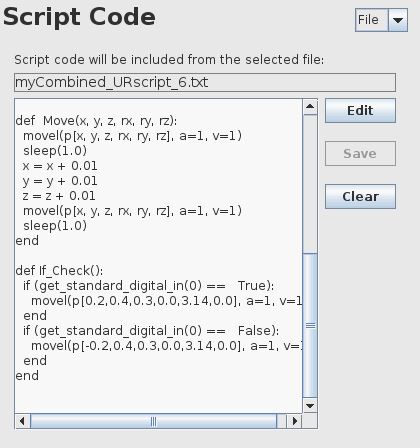
UR Programming Functions: – UR Forum-Help-Q&A

Universal Robots - Shop Products
UR Programming Functions: – UR Forum-Help-Q&A

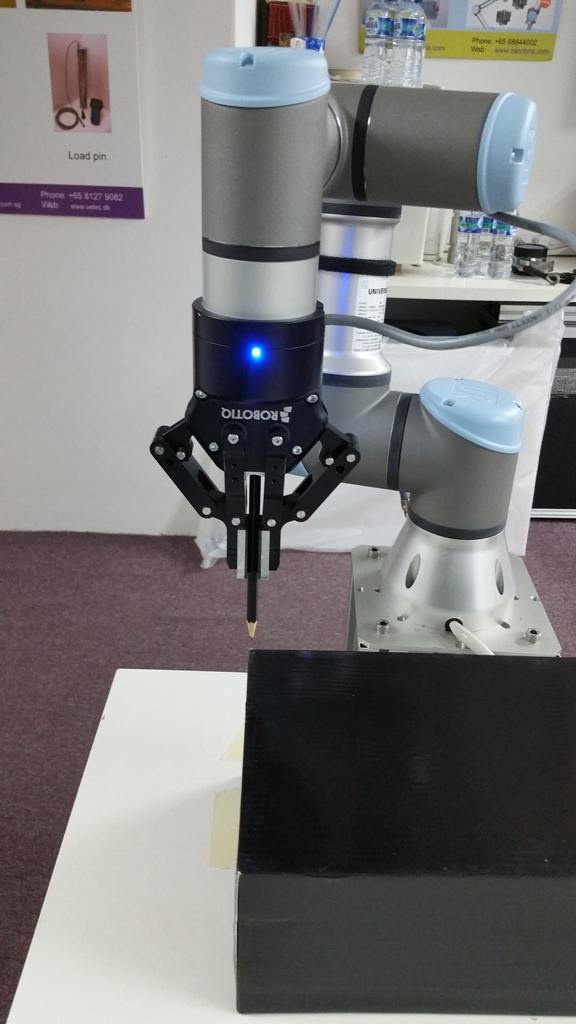
The Universal Robots arm, which can be manually moved to teach-in

Direction until distance - Technical Questions - Universal Robots Forum
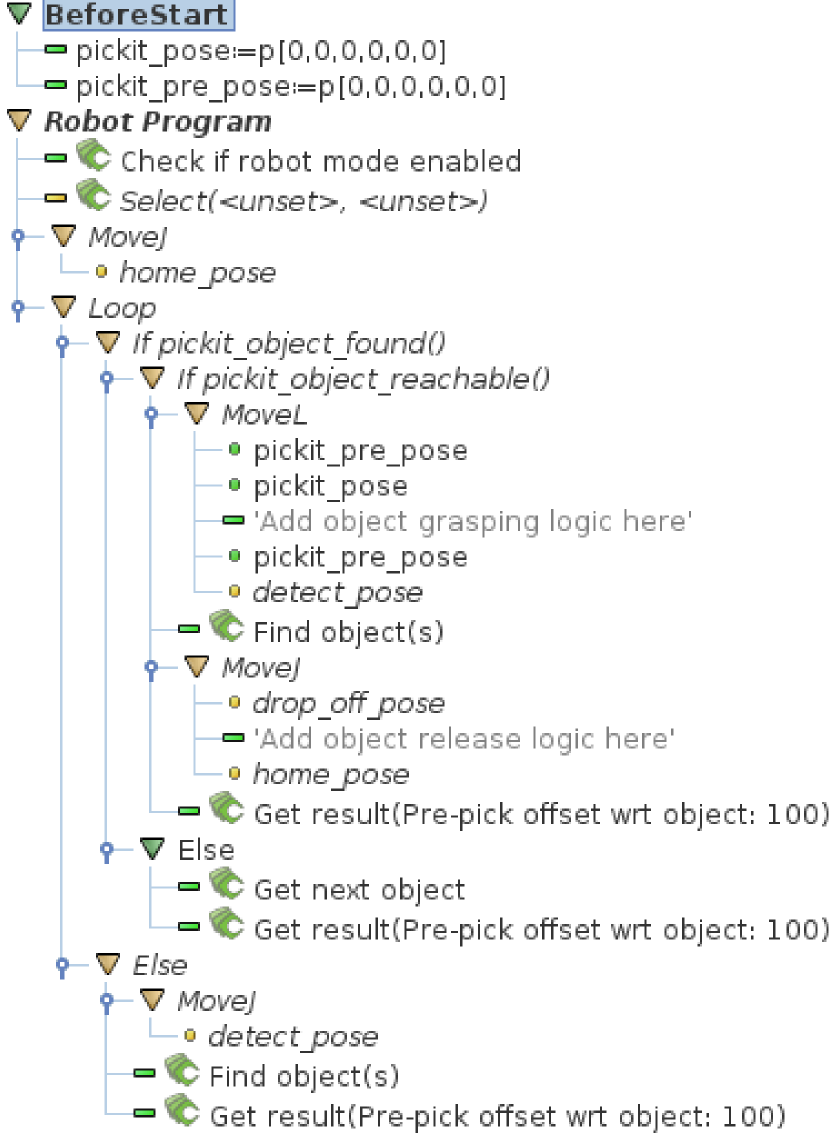
Universal Robots URCap example picking program — Pickit 1.10 documentation

Relative turn movement around TCP coordinate system - URScript - Universal Robots Forum
Planes and position variables 2 – UR Forum-Help-Q&A

Move with Offset - Product Wishlist - Universal Robots Forum

Can't save program in VirtualBox - Technical Questions - Universal Robots Forum
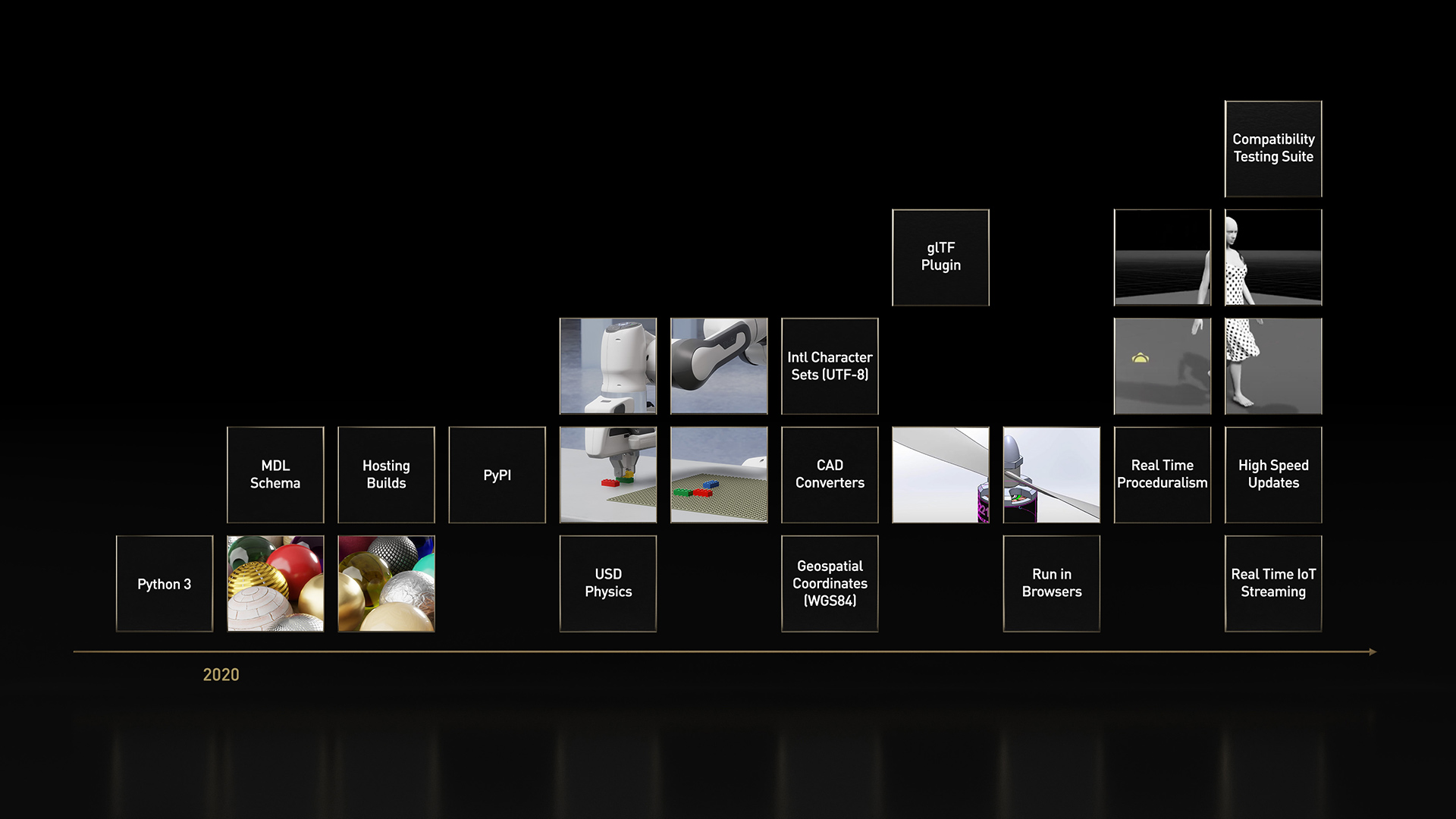
Universal Scene Description as the Language of the Metaverse
White Two Part End Fold, 50 Leaves In Duplicate, Carbon Sheet
Buy 15 x 11-1/8 x 2 Kraft Easy-Fold Mailers - 50/Pack (53BXPMIBMROSK)
White Silk Smooth 9x14.5 Presentation Folders w/ Reinforced Edges
 The Most Stylish Shorts for Women, According to Vogue Editors
The Most Stylish Shorts for Women, According to Vogue Editors SYROKAN High Impact Sports Bras for Women Underwire High
SYROKAN High Impact Sports Bras for Women Underwire High Cloudsoft Hipster Panty - Soft Gray
Cloudsoft Hipster Panty - Soft Gray Modern Crew Men Ultrasoft Micromodal Solid Short Underwear Brief - Buy Modern Crew Men Ultrasoft Micromodal Solid Short Underwear Brief Online at Best Prices in India
Modern Crew Men Ultrasoft Micromodal Solid Short Underwear Brief - Buy Modern Crew Men Ultrasoft Micromodal Solid Short Underwear Brief Online at Best Prices in India luxury Wear Suit Gown – Shayona Export
luxury Wear Suit Gown – Shayona Export Outfits cómodos y chic para el tiempo de frío - Moda para mujeres de 30
Outfits cómodos y chic para el tiempo de frío - Moda para mujeres de 30